

Suite de l'usinage
Nous avons continué dans notre lancée en usinant les 6 vilebrequins qui vont permettre de réaliser le mouvement des 4 paires de pattes du robot.
Ceux-ci ont été réalisés sur un tour 3 axes.

Tronçonnage d'un vilebrequin
De plus, nous avons usiné tous les axes qui iront dans les plaques de plexiglas.


Axe L2

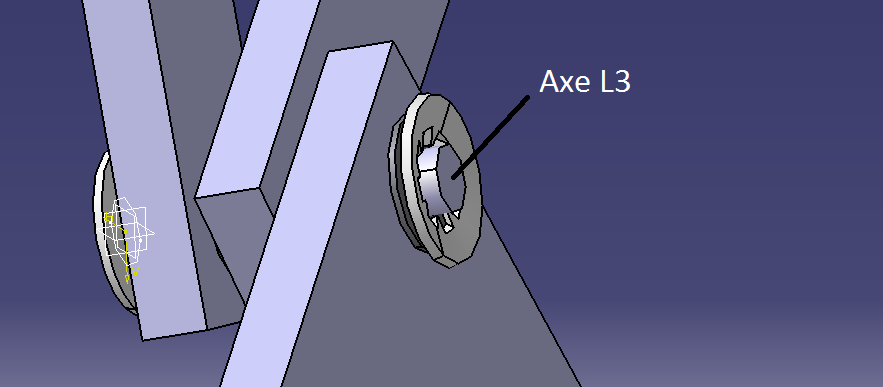
Axe L3
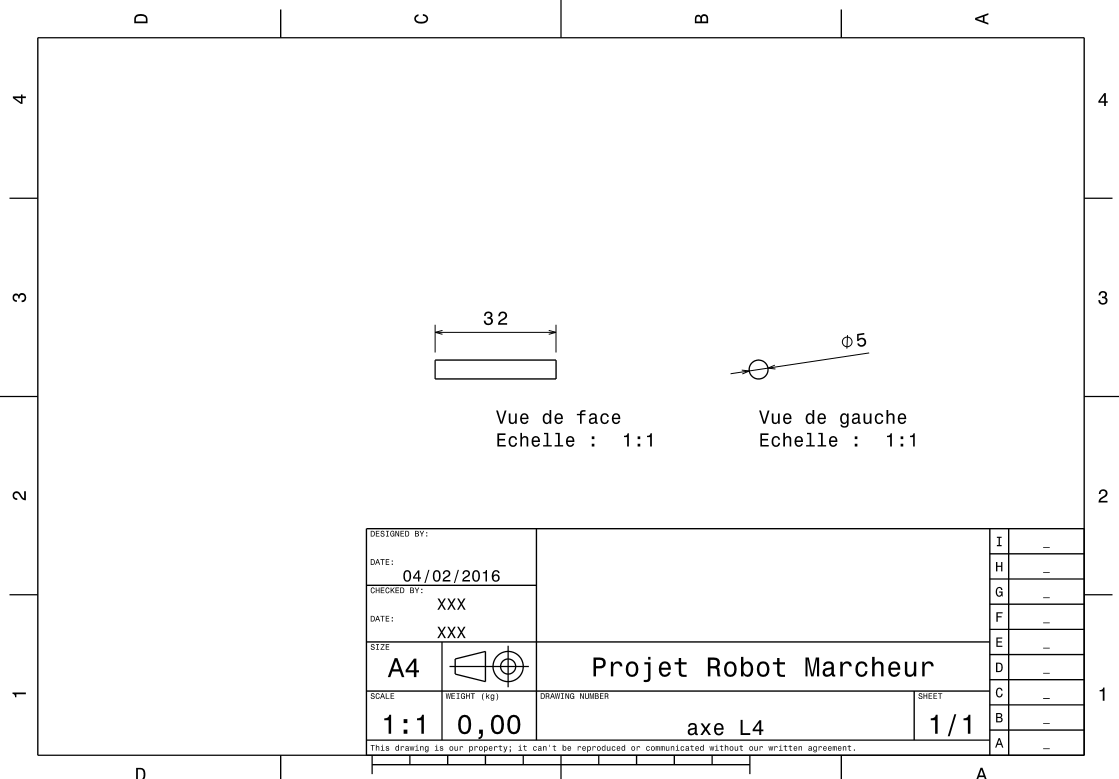
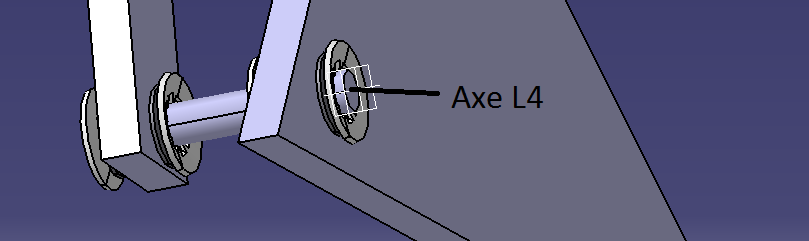
Axe L4
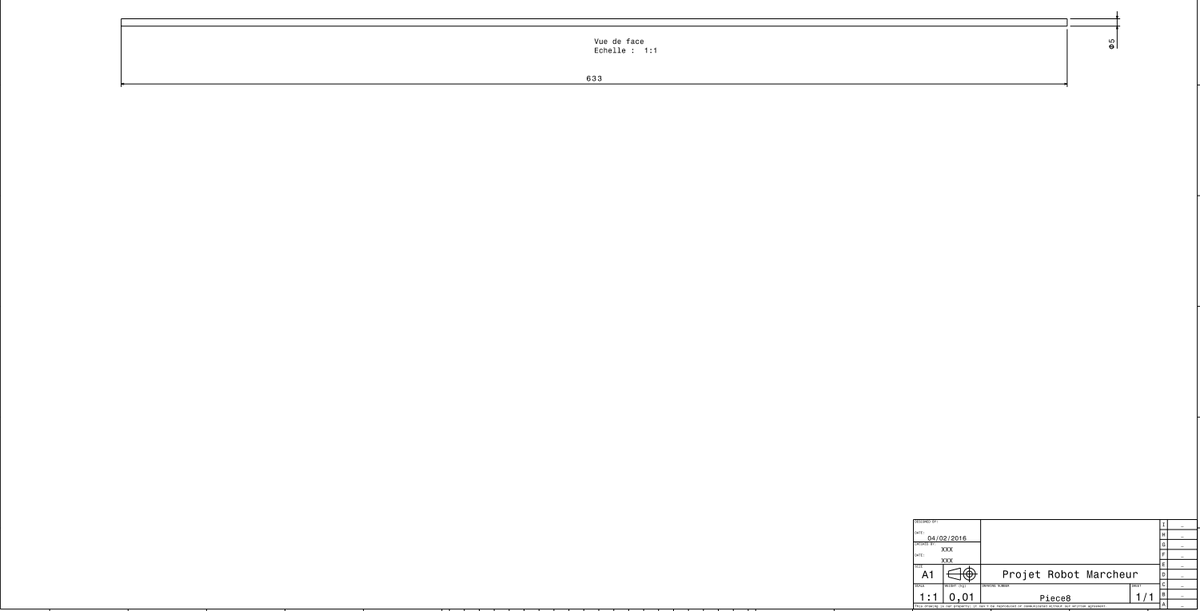

Axe long sur côté

Axe milieu
Enfin, nous avons également usiné toutes les plaques en plexiglas à l'aide d'une scie à ruban. De plus, des perçages sur ceux-ci.

Découpe des plaques de plexiglas

Découpe des plaques de plexiglas



/image%2F1485406%2F20160308%2Fob_03d3f0_img-0483.JPG)
/image%2F1485406%2F20160204%2Fob_ea92f6_img-4635.JPG)
/image%2F1485406%2F20160203%2Fob_f415e7_1.png)
/image%2F1485406%2F20150327%2Fob_265923_img-1960.JPG)
